
It’s been many years since I first celebrated being able to autoguide while exposing astrophotos on my CCD camera. (Finally autoguiding from 2009.)
Now with new techniques and software available, I might be able to abandon autoguiding.
The current software and hardware stack for astrophotography is so vastly different and better than what I had to work with in 2009. These are all the new or different things:
- “Pulse guiding”: No more brute-force “relay” controls to guide the mount, instead send pulses through ASCOM (That’s one fewer cable and point of failure from the camera to the mount.)
- Sequence Generator Pro for automating nearly everything
- Skytools 3/4 for planning and target selection
- Plate solving — OMG plate solving! Astronomy.net local solver ANSVR
- Bahtinov masks for focusing
- Light panel for making flats
- Astro-Physics right-angle polar scope for early evening polar alignment.
- PEMPro for polar drift alignment and creating periodic error correction curves
- CCDStack for processing
Finally what must be the most world-changing addition for me: telescope point mapping, modeling, and correction.
When I upgraded the big telescope mount from a 1997 AP 900 QMD (not a go-to mount!) to a new 1100GTO mount, it came standard with the Astro-Physics Control Center (APCC) and an offer to upgrade to to the “Pro” version that included point mapping and modeling. I declined to upgrade to the pro version.
I thought point mapping and modeling would be silly and useless outside of a permanent observatory. When I set up every evening, and tear down every morning, any previously created pointing model would be totally useless. That’s true, but I was wrong about it being useless!
I brought up the question on the ap-gto email list, and other astronomers told their story of getting great results with a small point map in evening twilight, and doing unguided imaging all evening.
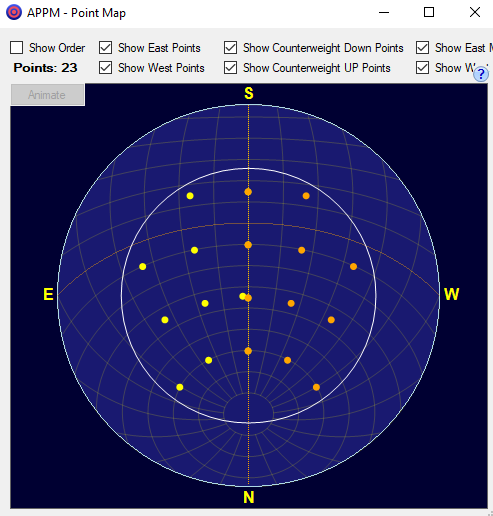
Example of my small point map used for building a pointing model early in the evening before shooting images.
It all starts about ten- to fifteen-minutes after sunset. I can usually see Polaris in my RAPAS (right-angle polar alignment scope) by then. If I start with a level mount, and put Polaris on the right hour angle of the reticle, I get a polar alignment that’s easily within 5 arc-minutes.
The next step is to find a good bright alignment star to use with the Bahtinov mask for focusing. This spring, I’ve been using Arcturus, Spica, or Vega. My focusing is all manual.
I’m finding with a good polar alignment and level mount, I can usually land my focus star on the chip by telling the mount to “go to” that position. It’s a little less likely in the big f/9 AP 180 EDT with its narrower field of view.
Once I have a good focus, I’ll do a few 5-second captures to see if a few stars are appearing in the twilight. It happens very quickly!
On my (old, slow) ASUS Windows laptop, I have installed a local instance of the Astronomy.net plate solver (Google: ANSVR). All the plate solving data I need is downloaded to the local server, and there’s no need for an internet connection. Sequence Generator Pro (SGP) orchestrates the downloading of images from the camera and submitting them to the plate solver with an approximate mount position. When the plate solver has a good “hint” of where the telescope is pointed, it usually converges on an absolute position within a few seconds of an image being submitted.
Now that I have one successful plate solve, I’ll launch into APPM, the Astro-Physics Point Mapper.
It’s somewhat entertaining to watch APPM work through its routine. It starts by pointing to a zenith point. It captures a five-second image (I use 3×3 binning for smaller downloads), and submits the image to the plate solver. It logs the solution from the plate solver and records the deltas from where the mount believes it is positioned.
The process is repeated 23 times, once for each of the points you see in the diagram above. Slew, expose, solve, record. Rinse, repeat. At the end of the process, I install the new model into APCC, and I’m ready to start imaging. By now it’s just about the end of astronomical twilight on a summer evening.
This is a very small point map! If you were operating a fixed observatory, you might dedicate some hours to building a point map of 200 or more points. The model built from that map should be good for quite some time, barring any mechanical changes to the mount.
In my low-resolution wide-field imaging system, the results are magical. Every target selected lands in the center of the imaging chip. I don’t need to spend time doing a plate-solve-and-reposition step. Autoguiding of five-minute exposures is completely unnecessary. The same is probably true for a 15-minute exposure, but I’m completely happy with stacking multiple five-minute exposures.
To configure SGP, I select the “Direct Mount Guide” for its autoguider. I specify a fairly large “dither” amount between frames, so bad pixels won’t be stacked on top of each other. SGP no longer has to launch a massive autoguiding program, that would need its own calibration. I no longer have to hunt for a guide star in my bright Los Angeles County skies. Bad seeing doesn’t jar the scope this way and that as the guider tries to follow it, instead the scope moves smoothly across the sky with the target centered.
There is almost no time spent between targets now! PHD2 doesn’t have to find a new guide star. There’s no need to check-and-correct the pointing. I can collect 30 minutes of data on four targets in just a little over two hours.
I haven’t yet tried building a point model and taking unguided images with the big AP180 and 1100GTO mount, but I have every expectation that it will be a very similar experience.